Su primer proyecto grande fue un brazo robótico, pero tiene ganas de seguir indagando para poder realizar nuevos diseños. En esta entrevista nos cuenta sobre su experiencia, las investigaciones que llevó a cabo y cuáles son sus nuevos desafíos.
¿En qué consiste el proyecto del brazo robótico?
El proyecto del brazo robótico fue un reto personal con el objetivo de aprender más sobre electrónica, diseño 3D y programación. Con esto en mente, me propuse desarrollar un brazo robótico simple. Primero, diseñé cada pieza del robot en Onshape, un software de CAD. El segundo paso fue buscar las piezas necesarias, como la placa de desarrollo ESP32, que elegí por su precio económico y porque está integrada con un módulo WiFi. Los servomotores en Uruguay son muy costosos, y como no tenía un gran presupuesto, tuve que recurrir a algunos menos potentes y no tan fiables. El tercer paso fue desarrollar el software que controlara el brazo.
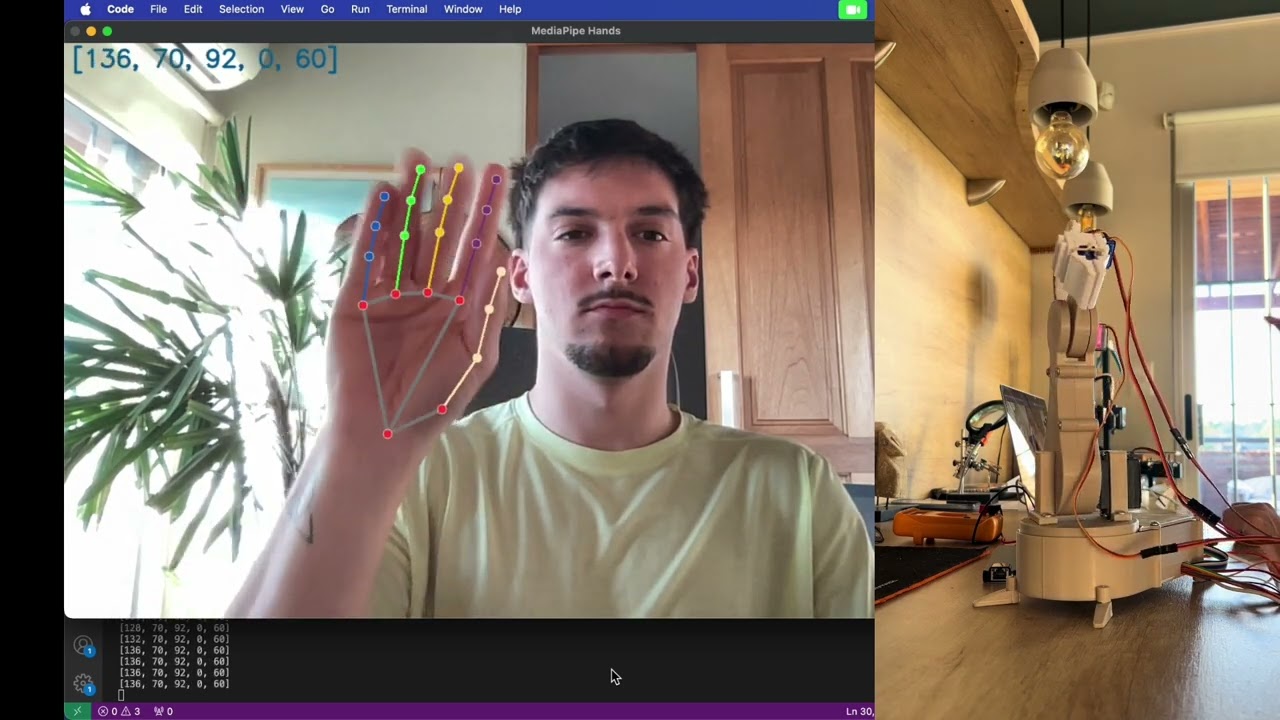
 Se me ocurrieron varias ideas: la primera fue usar un control remoto físico, pero era una de las opciones más sencillas y quería un reto más interesante. Después de investigar un poco, me encontré con una librería de Google llamada Mediapipe que tenía lo que necesitaba. Me permitía procesar un video en tiempo real, utilizando inteligencia artificial para detectar puntos de la mano (denominados "landmarks" según la librería) y crear gestos que correspondieran a movimientos del brazo robótico.
Se me ocurrieron varias ideas: la primera fue usar un control remoto físico, pero era una de las opciones más sencillas y quería un reto más interesante. Después de investigar un poco, me encontré con una librería de Google llamada Mediapipe que tenía lo que necesitaba. Me permitía procesar un video en tiempo real, utilizando inteligencia artificial para detectar puntos de la mano (denominados "landmarks" según la librería) y crear gestos que correspondieran a movimientos del brazo robótico.
¿Qué fue lo que más te gustó de vincularte a la robótica?
Lo que me gusta es que el resultado final es algo tangible, no queda en el mundo de los ceros y los unos, como puede ser un proyecto solo de desarrollo de software. Tiene un poco de ambos mundos. También me resulta muy satisfactorio poder compartirlo con otras personas. Generalmente, todo el mundo encuentra fascinante esta área y es fácil conectar con personas que no saben nada de electrónica, pero igualmente les resulta sumamente interesante.
¿Cuál fue el mayor desafío que enfrentaste durante el desarrollo del brazo robótico y cómo lo solucionaste?
Sin lugar a dudas, el mayor reto del proyecto fue lograr que cada sistema funcionara de forma correcta y en armonía con el resto. Es decir, conseguir que las conexiones entre el microprocesador y los motores fueran las correctas, y luego asegurar que la comunicación entre el microprocesador ESP32 y la computadora funcionara adecuadamente, así como que el código de reconocimiento de gestos enviara la información correctamente.
Parece sencillo, pero cuando algo no funciona, es difícil entender cuál de los sistemas causa el problema. Para solucionar esto, me concentré en asegurarme al 100 % de que cada sistema funcionara correctamente por sí solo, realizando muchas pruebas a cada uno de forma individual.
¿Qué nuevas habilidades o conocimientos adquiriste al trabajar en este proyecto?
Algo que descubrí trabajando en este proyecto es que hay muchas herramientas muy potentes que son de libre acceso, como la librería MediaPipe de Google, que es el corazón del proyecto. Por eso, diría que aprender a investigar y leer la documentación es fundamental. Con esto también quiero decir que muchas veces no es necesario reinventar la rueda, sino aprender a utilizarla.
¿Tenés algún proyecto que te gustaría desarrollar en el futuro relacionado con la robótica?
Me gustaría desarrollar un perro robótico intentando imitar los que desarrolla la empresa estadounidense Boston Dynamics. Lo que me resulta interesante de este proyecto es lograr que el robot aprenda a caminar integrándolo con un modelo de Reinforcement Learning.
Con este enfoque, el robot aprendería progresivamente a caminar sin tener que indicarle manualmente los movimientos que debe realizar.